
因能通过物理场以非接触的方式操控微粒、液滴和生物样品,光镊、电场操控等技术在化学反应、微纳机器人和生物医学等领域得到了广泛应用。特别是电润湿和静电镊等电场操控技术,因能产生强大可调的电场并实现高时空分辨的物体操控而备受关注。然而,这类电场操控技术通常需要预先设计的复杂电极阵列和外接电源,因此在实际应用中面临灵活性低和适应性差的挑战。
7月25日,中国科学院深圳先进技术研究院智能医用材料与器械研究中心杜学敏研究员团队在自供能静电镊及物体操控方面取得重要研究进展,相关成果以“Self-powered electrostatic tweezers for adaptive object manipulation”为题,发表在Cell Press旗下旗舰期刊Device上。该静电镊基于聚偏氟乙烯-三氟乙烯(P(VDF-TrFE))基电极摩擦过程中的电荷累积和动态调控能力,为气、液、固等多种材质物体的精准操控提供了前所未有的灵活性和适应性,且适用于从开放到封闭的操控体系、单个到多个物体、二维到三维的操控表面,并广泛应用于液滴机器人、细胞组装和无泵微流控等领域。
论文上线截图
为解决物体操控灵活性和适应性的问题,研究团队基于前期光诱导带电表面材料及液滴操控的研究基础上,成功设计出无需复杂电极阵列和外部电源的摩擦发电供能的静电镊(Self-powered electrostatic tweezer, SET)。该SET由表面设计有微结构的P(VDF-TrFE)基自供能电极(Self-powered electrode,SE)、摩擦对介电衬底(Tribo-counter substrate)和润滑表面(Slippery surface)三部分组成。
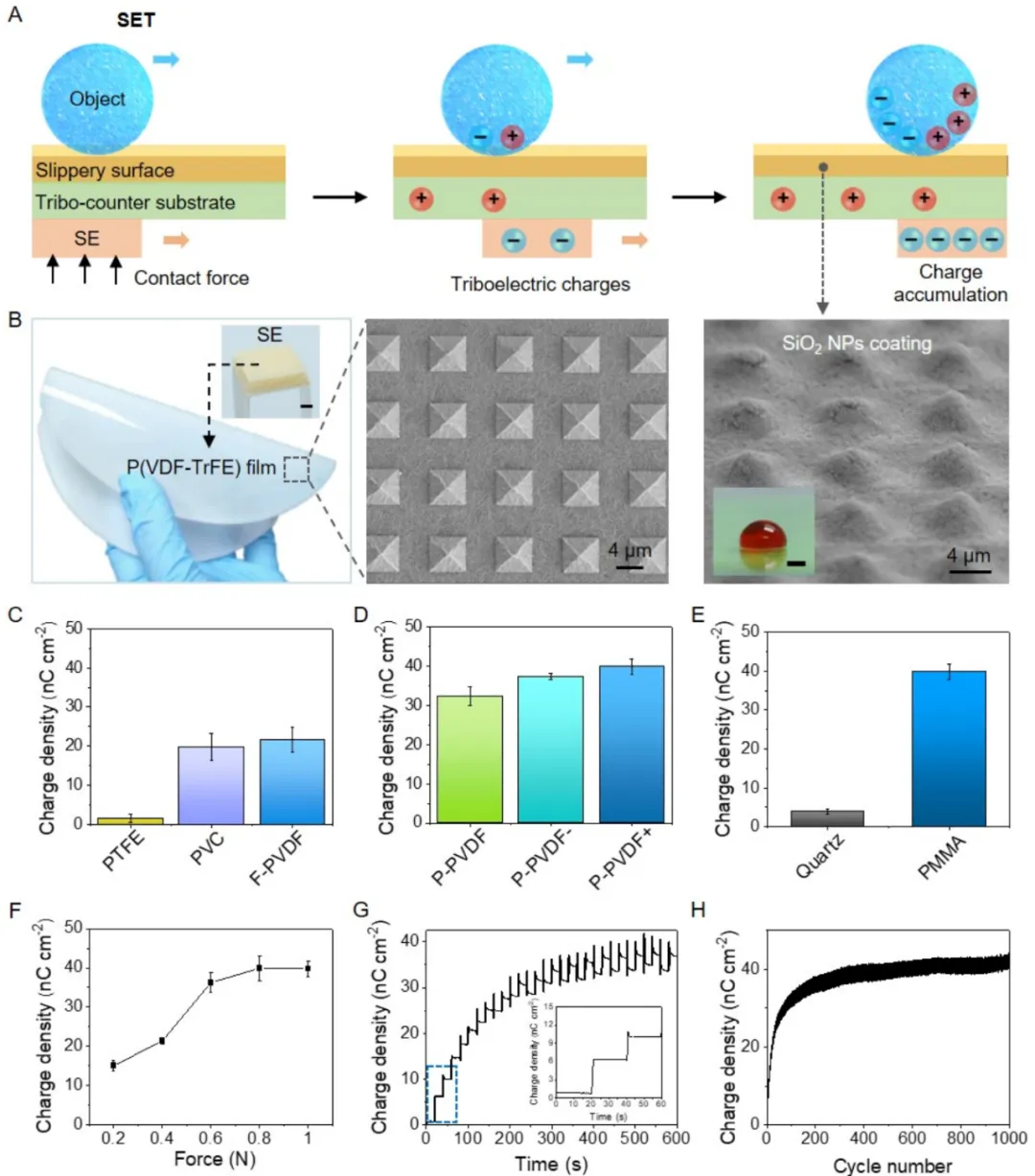
SET操控原理、设计制备及摩擦电性能
值得指出的是,P(VDF-TrFE)基电极具有优越的压电、摩擦电能力和独特的电荷累积功能,能通过调节电极和介电衬底表面间作用力以实时调节其表面电荷密度,可产生高达~40nC cm-2的电荷密度,且该摩擦电能力经过逾千次摩擦循环仍能稳定保持。由于自供能电极具有强大的摩擦电荷累积和调节能力,故能产生实时可调的强大静电力,进而实现对气泡、固体颗粒、各类液滴等不同材质物体的精准操控,最高液滴操控速度高达~353 mms-1。
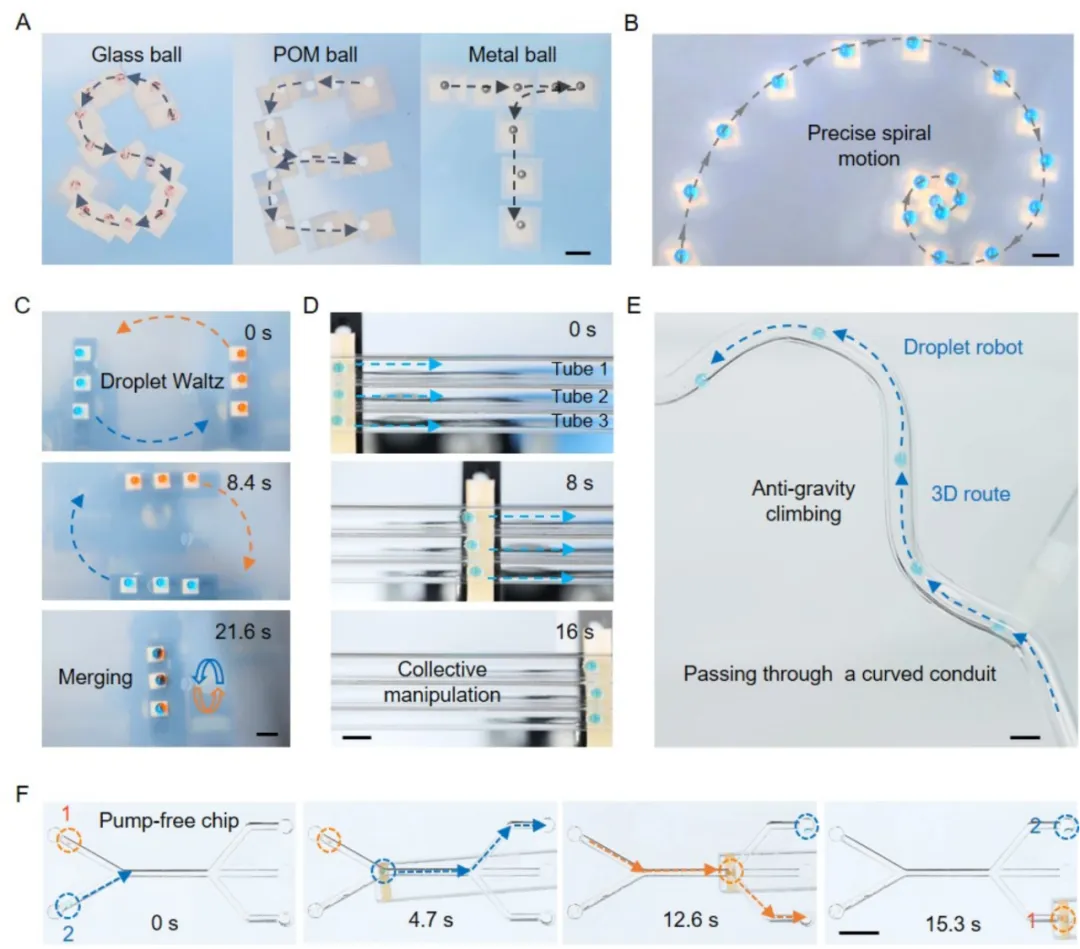
SET实现高度灵活性与适应性操控
SET不仅适用于包括PMMA、石英和氧化铝陶瓷在内的多种电介质衬底材料,而且适用于P(VDF-TrFE)和聚二甲基硅氧烷(PDMS)等多种润滑层设计,同时还适用于开放到封闭体系、手持到机械操控系统、单个物体到多个物体,以及二维到三维路径的精准操控。SET的高度灵活性和适应性可广泛应用于液滴分裂、液滴机器人、无泵微流控和细胞组装等领域。SET有望为非接触物体操控和微流体领域带来全新的技术。
深圳先进院杜学敏研究员为该文章的通讯作者,博士研究生刘聪为第一作者。该文章获得国家自然科学基金、国家重点研发计划、中国科学院青年创新促进会、广东省重点、深圳市医学研究基金等科技项目支持。
附件下载: